

大田表型机器人专为室外或大田作物的近地表型检测任务设计。采用灵活多变的4AWS转向方式,可实现多种复杂动作的运动模式,配合自主研发的田间地形自适应算法,适应不同的田间环境和作物种植模式等复杂作业场景,适用于水稻、玉米、小麦等多种作物。集成表型采集单元和运动单元可实现机器人内部信息互通,实现高效、高精度、一体化的表型数据采集。根据用户需求选配多种传感器,如可见光摄像头、热红外相机、高光谱成像仪、三维激光雷达以及结构光三维扫描仪等,全面捕捉植物的生长发育过程中的颜色、形态、结构纹理、生理生化等相关表型性状,实现多元数据的融合采集,为科研和生产提供详细的数据支持。机器人可通过人工遥控或导航模块自主工作,自主实现规划路径的运动控制,并内置适用于表型检测任务的运动控制算法,确保在复杂多变的环境中实现高精度作业。
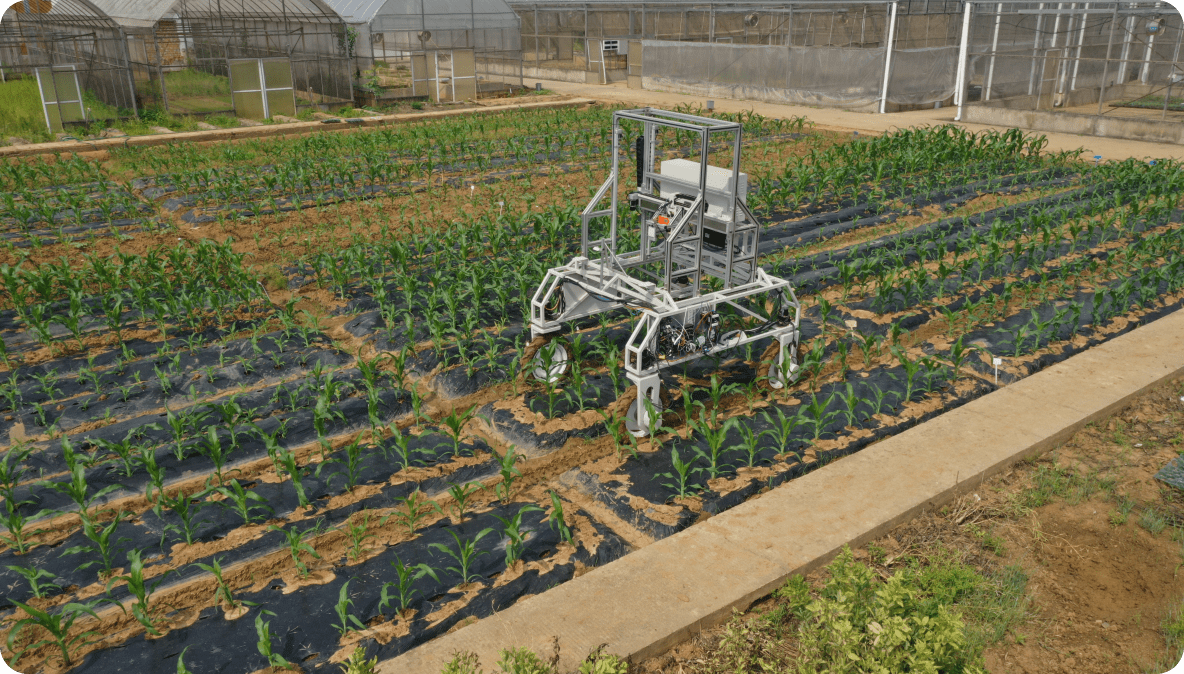
运动灵活性:机器人具备多种运动形式,包括阿克曼转向、楔形移动和原地旋转等,能够适应不同的田间环境和作物种植模式;
应用广泛性:机器人适用于水稻、玉米、小麦、油菜、大豆、棉花等多种作物的全生育期近地表型检测,具有广泛的应用场景;
环境适应性:机器人适用于多种作物全生育期的表型采集,无论是旱地还是涝渍地,都能有效完成采集任务;
自主化控制:搭载视觉导航模组和GNSS北斗模组,具有高度自主化控制能力,能够精确执行主体运动控制和表型检测单元的运动控制,确保在复杂环境中的高精度作业。
一体化设计:运动单元和表型采集单元融为一体,通过数据通讯系统实现内部信息的实时互通,提高了数据采集的效率和精确性,采用多线程架构分离数据保存与采集进程,确保数据存储与稳定性;
多维功能性:表型采集单元可根据需求选配多种传感器,如可见光摄像头、热红外相机、高光谱成像仪、三维激光雷达和结构光三维扫描仪等,实现多元数据的融合采集,支持双机协同控制;
数据全面性:机器人能够全面捕捉植物生长发育过程中的各种表型性状,包括颜色、形态、结构纹理、生理生化等,为科研和生产提供详细的数据支持。
 下载文档
下载文档
不超过2.2*2.2*2.2m(可定制)
1.5m(可定制)
400kg
0-1m/s
5h
阿克曼、楔形、原地旋转
卫星+视觉融合导航(导航精度±5cm)
可搭载多种传感器,如激光雷达、高光谱、热红外、可见光等